OUR WORK
Computer Vision
The challenge for this assignment is how to accurately track a device position. A simple proof of concept has been developped based on CV.
A webcam determines the position of an aruco marker in 6 DOF.
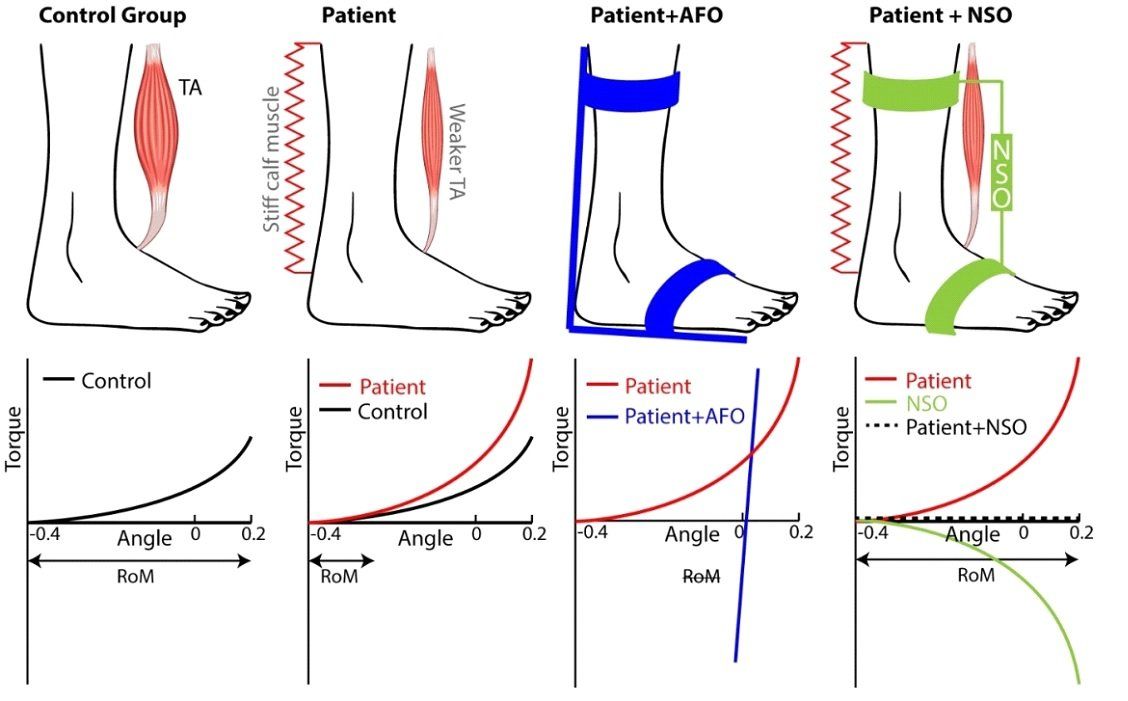
Negative Stiffness Orthosis
The approach for the Negative Stiffness Orthosis is to compensate the increased passive stiffness of the ankle with a negative stiffness. The Negative Stiffness Orthosis(NSO) was designed, built and evaluated. Magnetic neodymium was used to generate a compensating torque-angle relation for patients with a passive ankle stiffness classified as Ashworth 2.